RoboCup Open Platforms & Tools
Robot soccer vision data from real competition environments
A large image dataset for developing and evaluating vision systems on Nao V6 humanoid robots. The dataset combines nearly two million camera images with manual situation categories and a representative subset of pixel-wise segmentation masks.









What is included
Images, labels, and condition metadata
The dataset is intended for teams and researchers who need realistic robot soccer imagery rather than curated lab scenes. It covers multiple RoboCup-related events, several contributing teams, top and bottom camera streams, and environmental metadata for each game.
Condition-aware evaluation
Evaluate models on the situations that usually break them
Robot soccer vision has to work across venues, light sources, surface quality, shadows, reflections, and field markings. Manual categorization turns these factors into usable metadata, so models can be trained on selected conditions and evaluated on controlled subsets instead of only on random image splits.

Light sourceSun LightArtificial LightMixed
Shadows and reflectionsNoneLight ReflectionsShadowsBoth
Line conditionsTapedSpray-painted (fair)Spray-painted (poor)
Field colorInconsistent Field ColorConsistent Field Color
Segmentation labels
Pixel-wise masks for semantic scene understanding
The labeled subset contains masks for the visual elements most relevant to robot soccer: field, field lines, ball, robots, goal, other image regions, and uncertain pixels. Boundary areas and visually ambiguous regions are marked as uncertain instead of forcing unreliable class decisions.

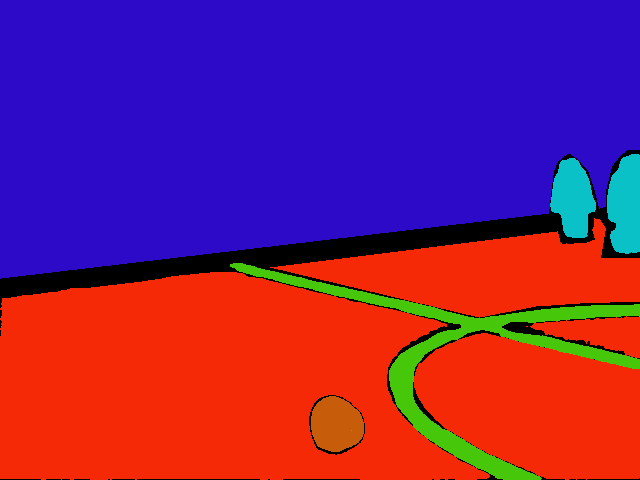


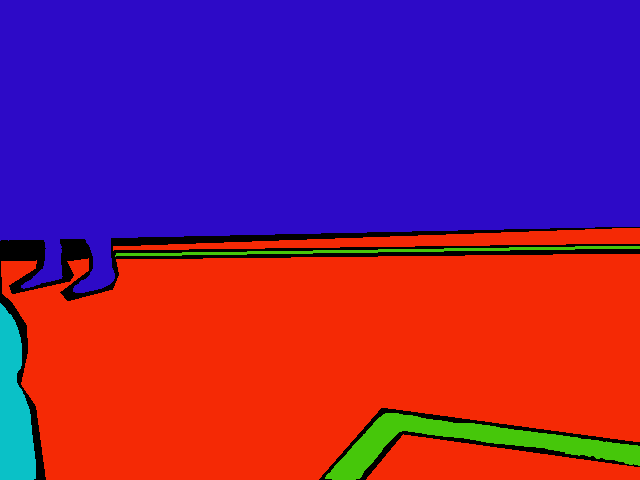

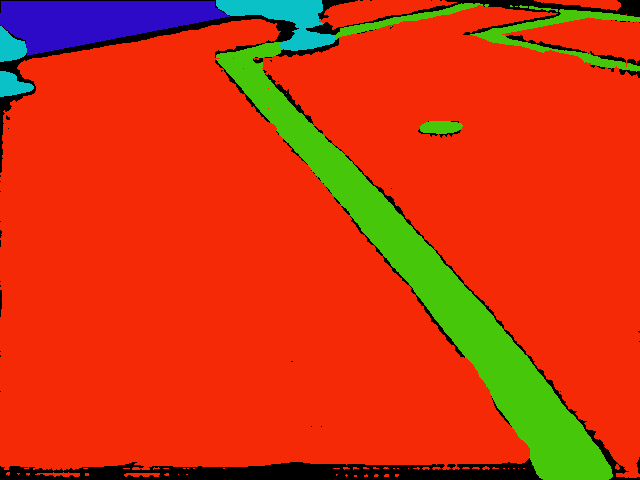
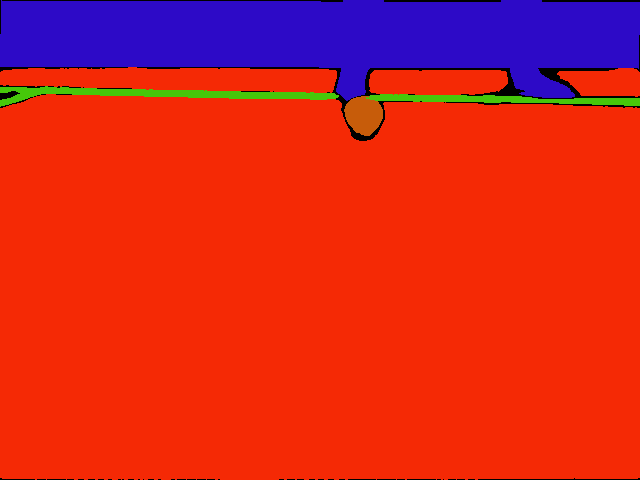
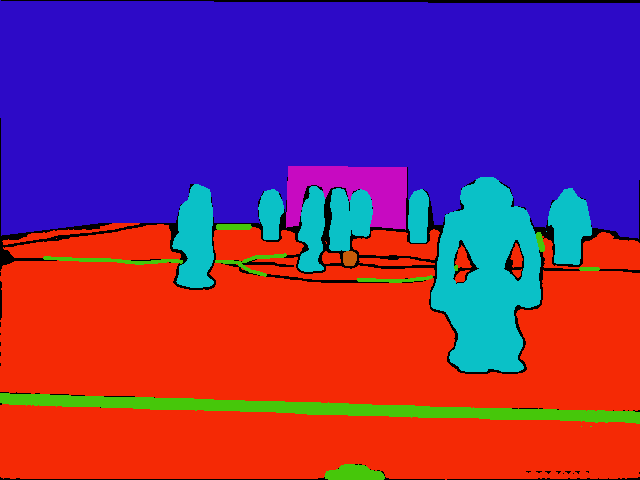
FieldLineBallGoalRobotOthersUncertain
Access and use
Download and start filtering by scenario
The archive is organized by game, robot, and camera. Metadata describes the recording context, image format, and manually assigned environmental conditions, enabling users to create training, validation, and test splits for the scenarios they care about.
The dataset is released under the Creative Commons Attribution 4.0 International license (CC BY 4.0).
Acknowledgments
Built from shared RoboCup data
This dataset was made possible by contributions from multiple RoboCup teams. We thank B-Human, SPQR, Nao Devils, BerlinUnited, and the Dutch Nao Team for providing images that helped broaden the dataset beyond a single team or venue.
RoboCup Symposium 2026
Paper and citation
The accompanying extended abstract describes the dataset, its manual condition categories, the representative segmentation subset, and intended applications for RoboCup and robot soccer vision research.
@misc{goettsch2026naodataset,
title = {A Large Image Dataset for Robot Soccer in Diverse Competition Environments},
author = {G\"ottsch, Franziska-Sophie and Schmidt, Maximilian},
year = {2026},
note = {RoboCup International Symposium Open Platforms and Tools submission}
}